
Phase distortion refers to disturbances that occur directly in the phases of the tones that make up a signal. In addition, for phase distortion to exist, the “appearance” of the original signal must be modified. The impact and significance of phase distortion will depend on two factors. First, the nature of the original signal, which establishes the sensitivity of the original signal to phase distortion. Secondly, the power of the distortion exerted.
The direct effects that a transmission medium or an electronic component can have on the signal phases are explained below. By means of analysis and examples, a distinction is made between cases that produce distortion and those that do not.
Mathematical Model
As prior knowledge to understand the text, it should be taken into account that signals can be decomposed into a sum of tones of amplitude A, frequency f, and phase \footnotesize \varphi [1]. Therefore, a generic signal s(t) composed of N tones, would be expressed as follows:
\begin{equation} s(t) = \sum_{i=1}^N{A_i}\cos(2{\pi}f_it\,+\,\varphi_i)\qquad i=1,2,3….,N \end{equation}
However, in this text the explanations will be made considering a signal composed of only two tones, of amplitude A=1, and initial phase shift \footnotesize \varphi=0 . It should be emphasized that such simplification does not eliminate the general nature and applicability of this analysis. On the contrary, this simplification makes it possible to understand phase distortion more easily.
In this sense, we consider a signal \footnotesize s_{in}(t) , composed of two tones of amplitude 1 and zero initial phase shift, at the input to a transmission medium or electronic component:
\begin{equation} s_{in}(t) = \cos(2{\pi}f_1t)\;+\;\cos(2{\pi}f_2t) \end{equation}
With \footnotesize \varTheta(f) being the phase shift exerted by the medium or electronic component, the output signal \footnotesize s_{out}(t) would be defined by the following expression:
\begin{equation}\begin{split} s_{out}(t) & = \cos(2{\pi}f_1t + \varTheta(f_1))\;+\;\cos(2{\pi}f_2t+\varTheta(f_2))\\&= \cos\left( 2{\pi}f_1\left(t+\frac{\varTheta(f_1)}{2{\pi}f_1}\right)\right)\;+\;\cos\left(2{\pi}f_2\left(t+\frac{\varTheta(f_2)}{2{\pi}f_2}\right)\right) \end{split}\end{equation}
From (3) it can be seen that the delay \footnotesize \tau(f) undergone by each frequency component is given by the following expression:
\begin{equation} \tau(f) =- \frac {\varTheta(f)}{2{\pi}f} \end{equation}
Next, two possible ways of modifying the phases are studied: without generating distortion and generating distortion.
No Phase Distortion Effect: Signal Delay
Theory
The case without phase distortion occurs when the signal \footnotesize s_{in}(t) simply undergoes a delay d as it passes through the transmission medium or electronic component. For this, the introduced phase shift \footnotesize \varTheta(f) must be linear with frequency and proportional to the delay d. Mathematically:
\begin{equation} \varTheta(f) =-2{\pi}fd \end{equation}
Under these conditions, applying (5) in (4), it follows that the delay experienced by each and every one of the frequency components is constant, \footnotesize \tau(f)=d .
Indeed, substituting (5) in (3), we obtain that the output signal is a replica of the input signal delayed d sg:
\begin{equation} s_{out}(t) \Bigg\vert_{\varTheta(f) =-2{\pi}fd}= \cos(2{\pi}f_1(t-d))\;+\;\cos(2{\pi}f_2(t-d)=s_{in}(t-d) \end{equation}
In short, a linear phase shift in frequency results in the same delay d for each and every one of the tones that make up the signal at the input of the medium. Consequently, the signal suffers a delay d and does not experience phase distortion. This is equivalent to saying that the appearance of the original signal does not change.
Signal Delay Example
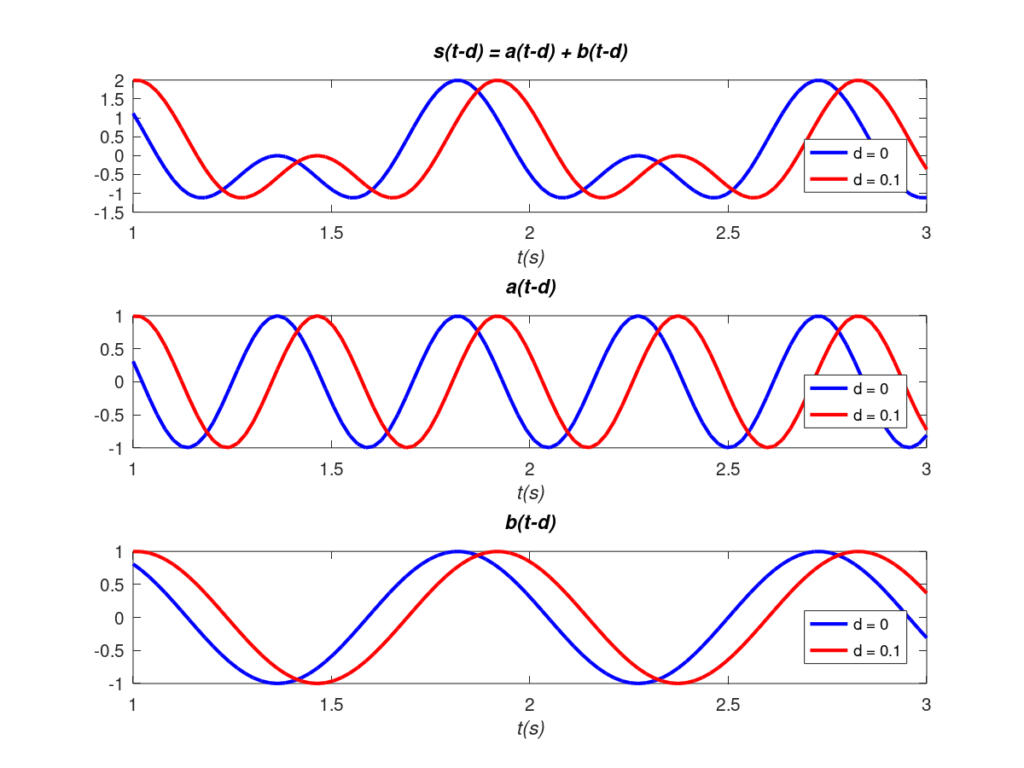
Finally, this case will be illustrated with an example. The following figure shows a signal \footnotesize s(t-d) composed of two frequency components, \footnotesize a(t-d) and \footnotesize b(t-d) While the case with d=0 sg represents the original signal, the case with d=0.1 sg represents the phase shifted signal. Since this signal is only delayed, it can be said that the appearance of the original signal is not changed. Therefore, in this case a linear phase shift has occurred, which never results in phase distortion. In other words, all the frequency components that make up the signal have undergone the same time delay.
Effect With Phase Distortion
Theory
Phase distortion occurs when the phase shift \footnotesize \varTheta(f) undergone by the frequency components of \footnotesize s_{in}(t) is not linear with frequency:
\begin{equation} \varTheta(f) \not \propto -f \end{equation}
If condition (6) is satisfied for at least two frequencies of the signal \footnotesize s_{in}(t) , it follows from (4) that both components will suffer different delays. And, therefore, the output signal \footnotesize s_{out}(t) will change its appearance with respect to the original signal. In this case, \footnotesize s_{out}(t) will no longer be a delayed replica of the input signal \footnotesize s_{in}(t) .
For simplicity, the mathematics are shown for the case of phase shift \footnotesize -\varTheta_k , constant in frequency:
\begin{equation} \varTheta(f)=-\varTheta_k \end{equation}
\begin{equation} \tau(f_1)=\frac{\varTheta_k}{2{\pi}f_1}=d_1 \end{equation}
\begin{equation} \tau(f_2)=\frac{\varTheta_k}{2{\pi}f_2}=d_2\end{equation}
\begin{equation} s_{out}(t)=\cos(2{\pi}f_1(t-d_1))\;+\;\cos(2{\pi}f_2(t-d_2)) \end{equation}
Phase Distortion Example
This case is illustrated with an example in the following figure. Returning to the original signal from the previous example, this time a constant phase shift, \footnotesize \varTheta(f)=\varTheta_k=-{\pi}/2 , is applied to each frequency component. After applying the phase shift, each component retains its appearance. However, the time delay of each component is different and, therefore, the appearance of the overall signal is modified. In this case, phase distortion occurs because the phase shift applied to each component is not linear with frequency.

In practice, the case of frequency independent constant phase shift requires a more complex analysis. When applied to bandpass communications signals, the distortion associated with the constant phase shift does not imply distortion in the demodulated signal [1].
On the other hand, distortion associated with other types of nonlinear phase shift with frequency produces an effect typically referred to as dispersion [2].
(For a more formal analysis of the linear distortion, please refer to this link).
Bibliography
[1] Communication Systems, A. Bruce Carlson.
[2] Fiber-Optic Communication Systems, Govind P. Agrawal
Subscription
If you liked this contribution, feel free to subscribe to our newsletter: